


Area Optimized
1mm²@7nm工艺(预估)
Lut 250k~400k(FPGA验证实例)
Flipflop 300k~350k(FPGA验证实例)

Power Optimized
ASIC低功耗实时4K降噪

Power Optimized
RAM消耗低至0.5MB/4K
效果展示
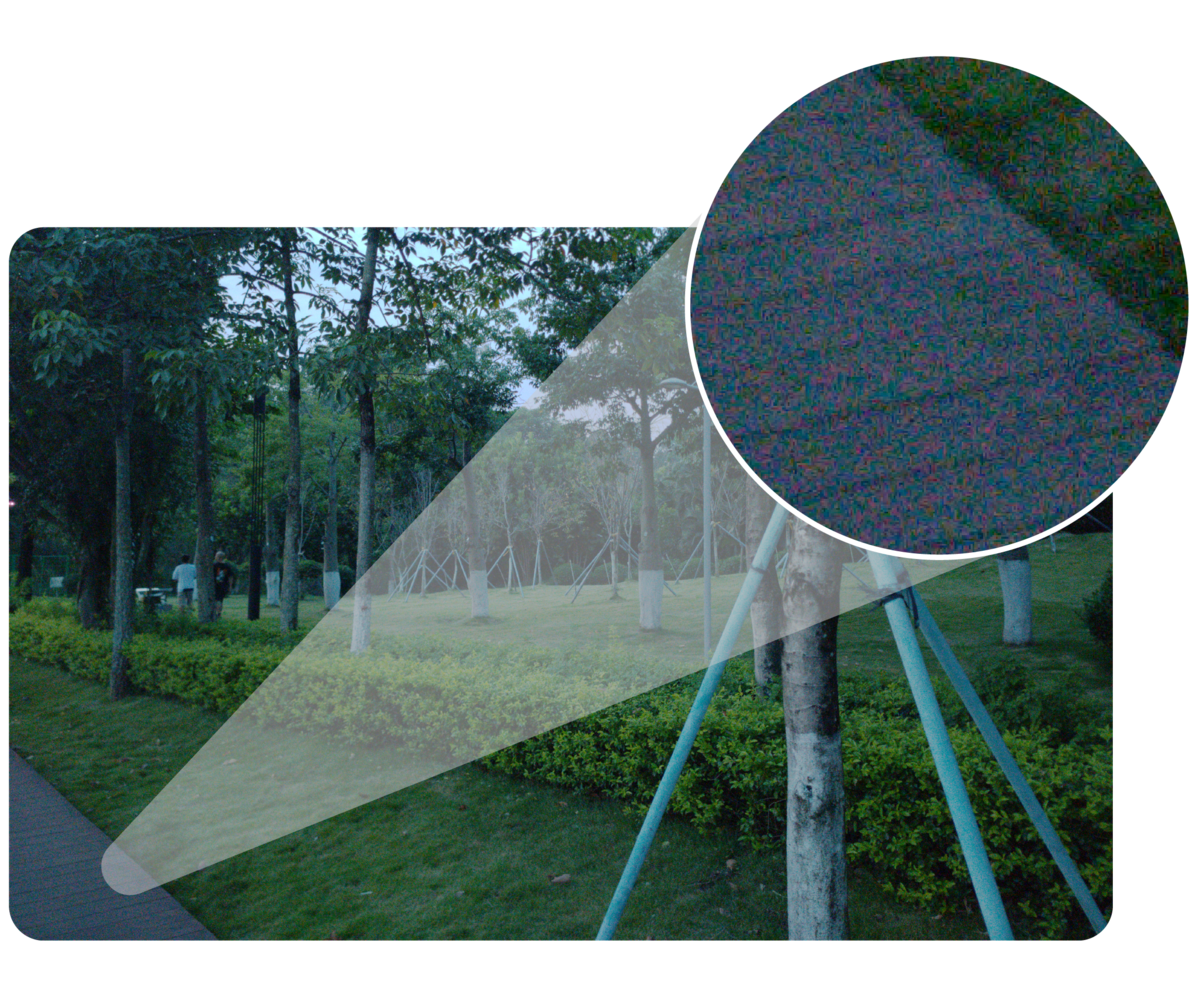
点昀技术首次推出RAW域4K实时BM3D降噪IP Core, 首次将单反级的图像处理能力应用在手机上。视频降噪能力提升30%,暗光 场景噪点更少,让手机大片越夜越美丽。 全球首次实现实时视频处理,可轻松集成并嵌入RAW域处理链路。
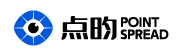
噪声图
结果图
单帧拍摄 传感器尺寸1/2″ IMX586 F/1.7 像素尺寸0.8μm





 苏公网安备 32060102320775号
苏公网安备 32060102320775号